
どうも、タナシンです(・∀・)ノ
今日も引き続きロビの作成を進めていこうと思います。
今日はパート15です!
週刊ロビ2 第15巻 マガジン部分
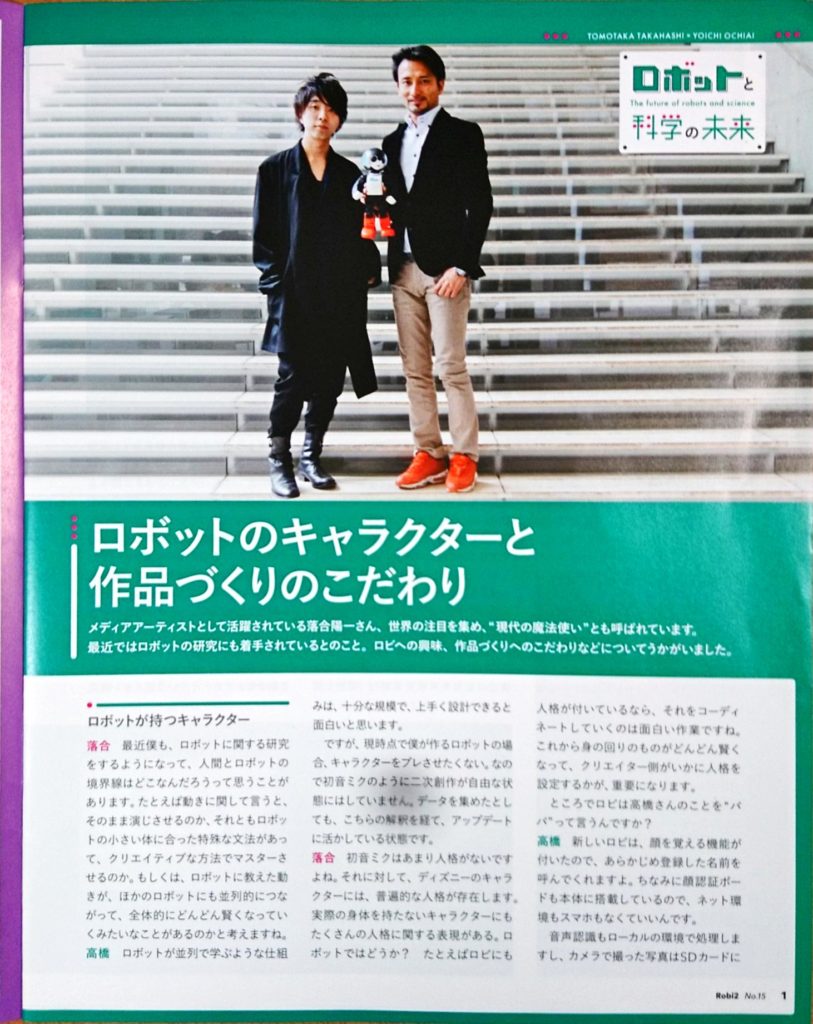
今号の対談記事はなんと、
落合陽一氏
です!
個人的にはついに来てしまったという感じです。
高橋氏と落合氏の対談となると、一体どんな化学反応が起こるのか、非常に楽しみな組み合わせですね。
ちなみにこの対談は次号に続きます。
今号では高橋氏と落合氏がロボットのキャラクター性について話しています。
私個人としてはこれは意外でした。
というのも、落合氏は数多くの活動をされていますが、ロボットに手を出しているという話を私は聞いたことがなかったからです。
落合氏はロボットと人の違いについて言及しています。
人とロボットの境界線はどこなのか、人と同じ動きをロボットにさせてよいのか、それともロボット固有の文法で動作させるべきなのかなどなど。
私個人としては、ロボットにはロボット特有の最適解があるような気がしています。
それが人とロボットの境界というものになるのか、人で言うところの個性というべきなのか、生物としての個体差というべきなのかはわかりませんが……
また、落合氏はロボットの人格のコーディネートについても話しています。
二次元でいうと、「初音ミクはあまり固有のキャラクター性を感じないけれど、ディズニーは明確にキャラクターがある」と言っていまして、「ロボットに人格があるならそれをコーディネートするのは面白い」とも言っています。
実は私もここは興味があります。
どのようなインプットに対して、どのような個性的なアウトプットを返すのか、これが人で言うところの反応であり、その人特有の行動やキャラクターにつながるのではないかと思います。
それと同時に、インプットに対して行うアウトプットで個性や人格を表現できるなら、AIを利用することでそれを再現できるのではないかとも考えています。
だから、このブログでもAIを取り上げているというのもあります 笑
ただ、人格はAIだけでは再現できないと思っています。
例えば「暴言を吐かれると怒りを覚える」というインプット/アウトプットをAIで再現することはできると思います。
ですが、その怒りの伝え方は極めて身体的に行われると思います。
マンガで例えるとわかりやすいですが、怒りを表す際は眉間にシワを寄せたり、歯を食いしばったり、地団駄を踏んだりなどがあります。
そして、この感情の表現方法が個性や人格につながる気がします。
個人的な意見ですが 笑
個人的にこの対談記事で意外だったのが、ロビのデータをSDカードで完結させていることに落合氏が好感を持っていることでした。
落合氏曰く、最近の機械はクラウドなどにつながっているため、どこまでが体に帰属する記憶か分かりづらくなっているとのことです。
確かにそれはそうだなぁって思います。
AIなどが普及し始めたことにより、更にこれが加速されたなぁと感じます。
AIはAPIで提供されることもありますし、処理にCPUを使う必要がありますので、クラウドで実行されることが多いです。
それはそれでやれることが増えるので良いのですが、それゆえにどこからがクラウドの処理?みたいなことを考えてしまうようになりました。
ですが普通に考えたら、人間はクラウドにつながらなくても目で見た映像を処理できます。
つまり、ローカルで処理が完結している方が人間的であると思います。
そういった意味で、高橋氏と落合氏がここに共感しているのは非常に納得感があります。個人的には 笑
他にもいろいろ対談されていますが、個人的にツボに入ったのが落合氏の働き方です。
かなりいろんな活動をされている方ですが、今は若さで凌いでいるようです 笑
まだ30代前半ですし、無理が効く歳なのでしょう。
ですが、先のことも考えて、自分がやりたいこと以外のことをいかに他人に任せるかを考え始めているようです。
私自身、落合氏と近い年代であり、まさに最近どこを人に任せるかを考える時期に来ましたので、とても共感できました。
できる限り自分は自分にしかできないことをやり、それ以外をいかに他の人に任せられるか……難しいですね。
これに関して高橋氏は、「人に任せたところに面白いことがあるのではないかと考えてしまう」と言っていました。
私もその気質が多少ありまして、できれば自分で全部やりたいと思ってしまう程度には欲張りです。
できないことは知っているのですが……
サーボモータのスペック
今号ではもう一つ記事があります。
それがモーターのスペックについての記事です。
ここではサーボのスペックとして出力トルク、回転速度、動作角度、使用電圧範囲についての説明がされています。
出力トルクと回転速度はなんとなくわかると思います。
トルクはモータが出せるパワーです。
回転速度はモータが回る速さです。
動作角度はちょっとイメージがわかない人もいるかと思います。
一般的に知られているモータ、例えばミニ四駆に使われているようなモータを想像すると、モータは360度回りますので、動作角度は360度では?と思う人もいると思います。
ですが、サーボモータではそういうわけにはいきません。
サーボモータは中に普通のモータと、その先端にギアが付いています。
そのため、中のモータが何回転かすると、サーボモータの先端が数度動きます。
そのような動かし方をし、かつどの程度先端が回転しているかというのを測っていますので、何周も回すことができません。
大抵は280度とか300度とかの動作制限がついています。
これが動作角度になります。
ちなみに、動作角度が300度の場合、原点を中心として左右に150度ずつ回るようになています。
使用電圧範囲は読んで時のごとくです。
サーボモータが入力して受け付ける電圧の範囲です。
簡単ですね。
今号の組み立て
ここからは今号の組み立てをしていきたいと思います。
今後の部品は以下です。

今号の部品一覧 
今号の完成図
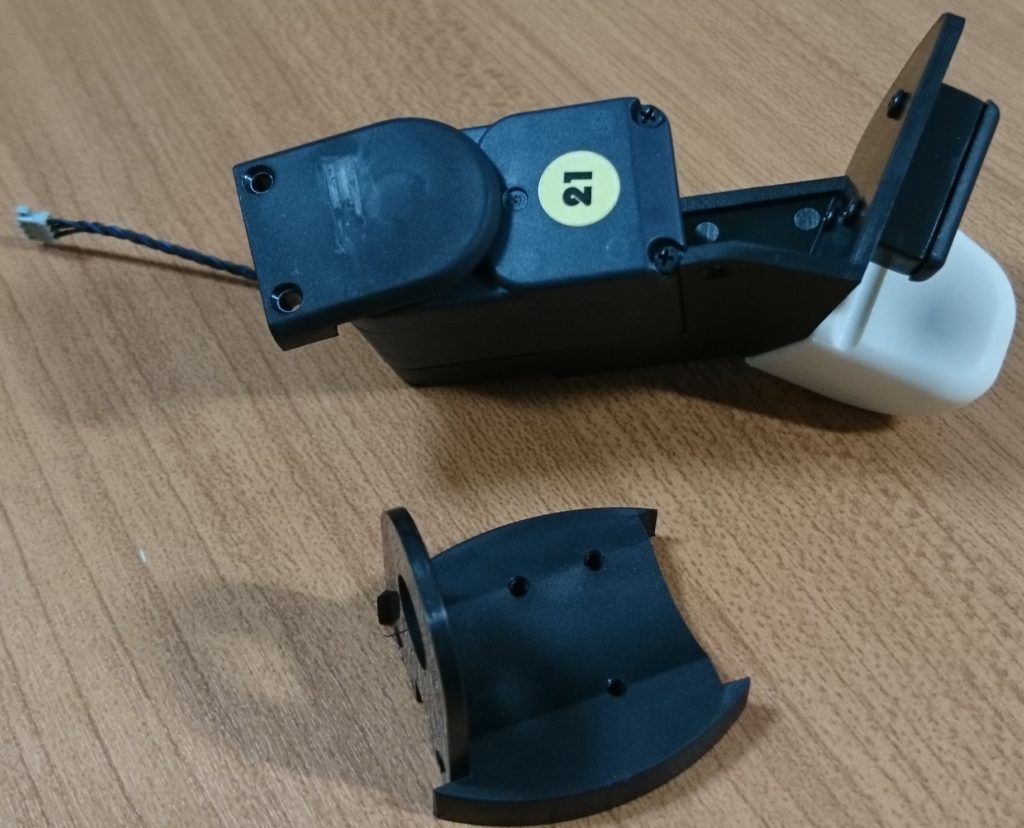
今号は左腕を作っていきます。
実際の部品は以下です。

この部品と前号までに作った左腕のパーツを組み合わせていきます。
右腕でもやった作業なので余裕です。
パッとやっちゃいましょう。
左肘パーツ取り付け
まずは肘パーツの取付です。
フロントパネルをつけます。
サーボモータのシャフトにパネルをぶっ刺すだけです。

使う部品 
取り付け
左腕フレーム取り付け
次に、左肘フレームを付けていきます。
位置を合わせてネジ止めするだけです。
使う部品 
取り付け
前腕カバー取り付け
最後に前腕カバーを取り付けて、ネジ止めします。

使う部品 
取り付け
以上で完成です。
ちょろいですね!
まとめ
今回も組み立て内容がちょろかったので、対談記事への言及を多めにしてみました!
というのは冗談で、高橋氏と落合氏の対談は面白く、いろいろ書きたくなってしまいました。
次号も対談記事のようですので、とても楽しみですね。
それでは、今回はこのへんで!
では、また次回(* ̄▽ ̄)ノ~~ マタネー♪

コメント
[…] 週刊ロビ2を1からゆっくり組み立ててみよう part15表紙どうも、タナシンです(・∀・)ノ今日も引き続きロビの作成を進めていこうと思います。今日はパート15です! 週刊ロビ2 第15巻 マ […]