
どうも、タナシンです(・∀・)ノ
今回も引き続き、ロビを作成していきます。
今日はパート6です!
![[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]](https://hbb.afl.rakuten.co.jp/hgb/17dd29c6.b0d435c4.17dd29c7.c6902c8d/?me_id=1252353&item_id=10011742&m=https%3A%2F%2Fthumbnail.image.rakuten.co.jp%2F%400_mall%2Froudokusha%2Fcabinet%2F05125820%2Fshohin4%2Fimgrc0073687508.jpg%3F_ex%3D80x80&pc=https%3A%2F%2Fthumbnail.image.rakuten.co.jp%2F%400_mall%2Froudokusha%2Fcabinet%2F05125820%2Fshohin4%2Fimgrc0073687508.jpg%3F_ex%3D128x128&s=128x128&t=picttext "[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]")
週刊ロビ2 第6巻 マガジン部分
今回の対談記事も佐藤琢磨氏です。

今回の記事の中では、佐藤氏がロビについて語っています。
ロビの歩き方であるSHIN-Walkに関して、高橋氏に「人間工学に基づくのか、ロボットのキネマティクス的に考えているのか?」と質問しています。
実際にこう言ったのかはわかりませんが、このような視点がある辺り、佐藤氏はロボットについてとても理解のある方なのではないかと思います。
そうでなければ、人間工学やキネマティクスという観点は出てこないと思います。
このような観点は、ロボット以外でもものづくりにおいて大事な視点だと思います。
人から見てどうなのかとロボットとしてどうなのかという2方向の視点を持った考え方だと思います。
ロボットの専門家でないにもかかわらず、このような視点を持てるところはとても尊敬に値します。
今号の組み立て
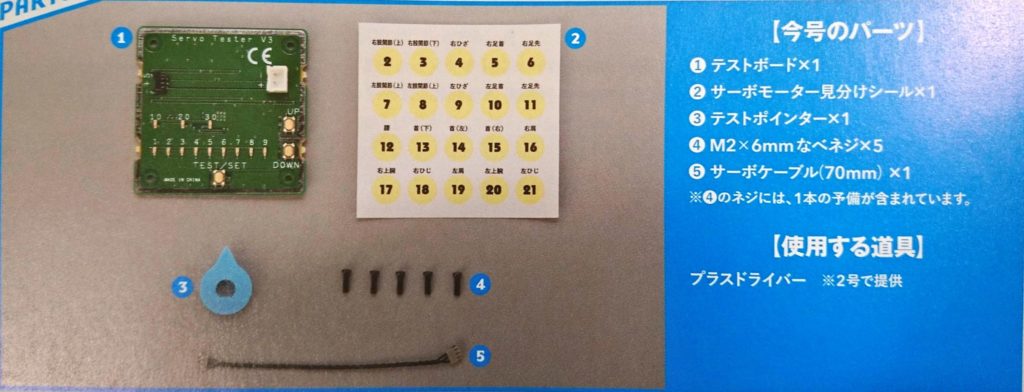
部品一覧 
実際の部品

今号はついにサーボモータを動かします!
やっとロボットを作っている感が出てきます。
テストボードの取り付け
まずは、今号に付いている緑色の基盤「テストボード」を取り付けていきます。
前号までに作成したロビの上半身の背中に、テストボードをネジ止めします。

バッテリーボックスの取り付け
電池を入れるためのバッテリーボックスを取り付けていきます。
まずは、バッテリーボックスに予め電池を入れておきます。
バッテリーボックスのネジを外して蓋を開け、単三電池をセットします。
私はエネループです 笑
電池は十分に残量があるものを用意しましょう

バッテリーボックス 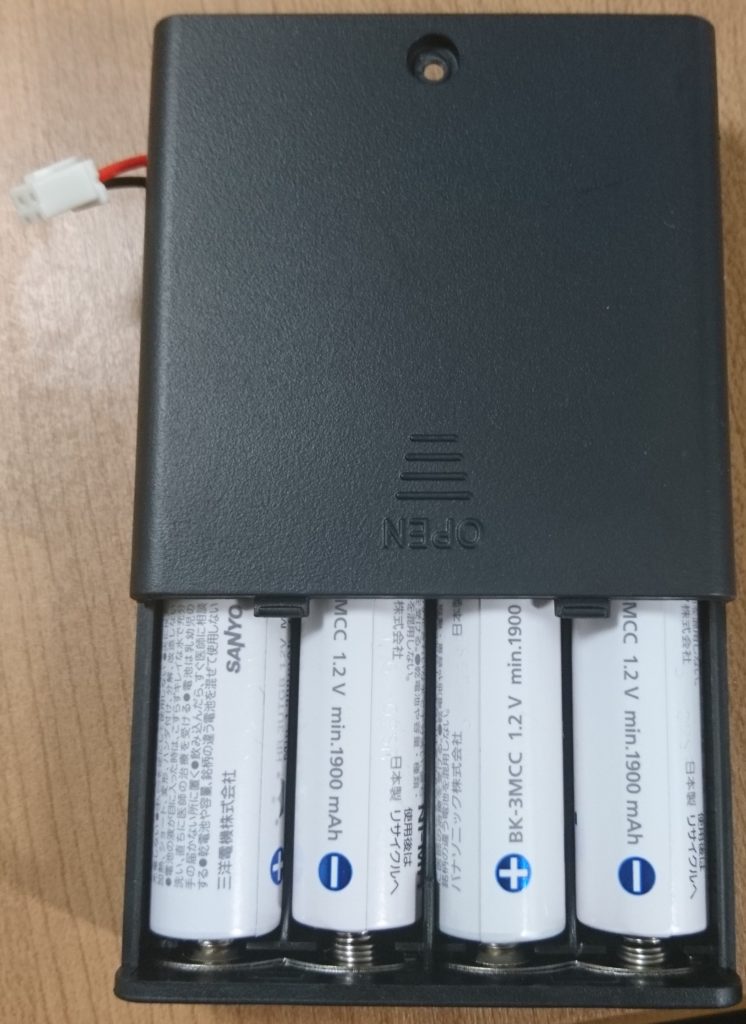
電池の挿入
次に、ロビの上半身をひっくり返し、腰に当たるくぼみに両面テープをつけます。
4箇所に両面テープをつけたら、バッテリーボックスを貼り付けます。
この際、バッテリーボックスのネジが手前(NO/OFFスイッチが頭部側)になるように取り付けます。

両面テープの接着 
バッテリーボックス設置
サーボコネクタの接続
次に、背中から生えているサーボコネクタをテストボードにつなげます。
これは、テストボード上のコネクタに差し込むだけです。

サーボモータの動作テスト
ここからいよいよサーボモータを動かしていきます!
先に、サーボモータにテストポインターを取り付けていきます。
これはサーボに差し込むだけです。
そして、スイッチON!

スイッチON直後 
スイッチONしばらくあと
電源をいれると、すべてのLEDが点滅します。
しばらくすると、1番のLEDだけが点灯します。
ここでもし、点滅が続くようであれば、電池が少ない可能性があります。
私はこれが原因ではじめ動かず、ちょっと四苦八苦しました 笑
1番のLEDが点灯したら、「TEST/SET」ボタンを押してみてください。
するとサーボが動きます!
サーボは上から見て「左→右→中央」という順番で動きます。
最後の中央へ戻る動作は動きが少なくて分かりづらい場合もあります。
ただ、もしここで動かないようであれば注意してください。
サーボコネクタがちゃんと刺さっていなかったたり、電池が少なかったりすることが一般的な原因です。
ですが、いずれもちゃんとセットされているにもかかわらず動かないようであれば、サーボモータの初期不良の可能性があります。
その際はディアゴスティーニにお問い合わせをすれば、初期不良として対応してくれます。
私は以前、ロビ1のときに初期不良が合ったため、お問い合わせをしたことがあります。
しかもその際は、購入から半年以上たった号に対する問い合わせだったのですが、初期不良として処理され、新品が送られてきました。
素晴らしい対応ですね!
さて、ここまでできれば、今号の作業は終了です。
まとめ
作業自体は簡単ですね!
ですが、今号からサーボモータを動かしたり、基盤を触ったりするので、慣れない方はおっかなびっくりかと思います。
また、トラブルがあった際に、メカ側(部品)が悪いのか、エレキ側(基盤やサーボモータ)が悪いのかを切り分ける必要があります。
おそらく、ロボットを作ったことがない方は、この切り分け作業で困ってしまうのではないかと思います。
その際はディアゴスティーニにお問い合わせするのも手だと思います。
もちろん、このブログにご質問いただいても構いません 笑
応えられるかはわかりませんが!
皆さんのロボットライフに幸あれ!
それでは、今回はこのへんで!
では、また次回(* ̄▽ ̄)ノ~~ マタネー♪


コメント