
どうも、タナシンです(・∀・)ノ
今日も引き続きロビの作成を進めていこうと思います。
今日はパート14です!
週刊ロビ2 第14巻 マガジン部分
今回の記事は対談ではなく、ロビの機能紹介シリーズです。
「ロビが名前を呼ぶ仕組み」と題してロビがユーザを認識して名前を呼ぶまでの仕組みを紹介しています。
ロビに名前を登録する方法
ロビに名前を登録するには、ロビブックという本の中に記載された名前リストから読んでもらいたい名前を選ぶらしいです。
つまり、一から名前を覚えるというよりかは、すでに登録されている名前から選んでいるようです。
更に、選んだ名前に対して「ちゃん」「くん」「さん」の3種類から呼び方を決められるようです。
私でしたら、タナシンの「シン」をとって、「シンちゃん」「シンくん」「シンさん」という呼び方になるということですね。
ロビブックに載っていない名前を送るとエラーになるようです。
その場合は、Q-boで名前を読み取ることで、読んでもらえるらしいです。
これは後ほど試したいですね。
人の顔を見つけてからロビが名前を呼ぶまで
ロビが名前を呼ぶ際は、まず人を認識する必要があります。
ロビは頭にカメラを搭載していますので、そのカメラで目の前にいる人を認識します。
ざっくり、認識してから呼び掛けるまでのフローは以下のようになっているらしいです。
- カメラで画像を取得する
- 画像の中から人の顔を見つける
- 顔から特徴を抽出する
- 抽出した特徴データと登録されている顔画像の特徴を比較する
- 2つの特徴が一定以上一致した場合、登録されている名前をメインのマイコンボードに送る
- 顔認証結果をマイコンが受け取った場合、名前を呼ぶ動作の命令が実行される
上記の手順を踏むと、ロビの胸のスピーカーから声が出ます。
ロビが呼べる名前に限りがある理由
ロビが名前を呼ぶ際に、ロビブックを使うことをお伝えしました。
ではなぜ、名前を新規に覚えさせて呼ばせることができないのか?という点ですが、これは技術的な問題ではありません。
技術的はお話をしてしまえば、一文字一文字を覚えさせて呼ばせれば、名前を呼ぶことはできます。
例えば「タナシン」という名前がロビブックに登録されていなかったとしても「タ」「ナ」「シ」「ン」という一文字ずつを記憶させ、呼ばせることはできます。
ですがこの場合、一文字一文字を発話するため、「タナシン」というフレーズを発音するわけではありません。
そのため、一般的にはどうしても違和感のある発音になってしまいます。
ロビはその違和感をできる限りなくしたいということで、あえてロビブックに登録された名前で呼ぶことを推奨しています。
余談ですが、最近ではチャットボットなどにAIが使われるようになりました。
ですが、チャットボットでAIが使われる部分は、主にユーザが入力した文章を理解するところになります。
ところが、最近はチャットボット内でのAI利用範囲を拡大させるために、ユーザへの返答の生成にAIを活用したり、チャットではなくボイスで応答する際の発話生成にAIを利用しようという試みがあります。
これが成長すれば、ロビが登録されていないいろんなセリフを自然に発話するときが来るかもしれません。
今号の組み立て
ここからは今号の組み立てをしていきたいと思います。
今後の部品は以下です。


今号は今まで何回もやってきた作業になりますので非常に簡単です。
サーボコネクタの接続
まずはサーボの蓋を外して、前号までについてきたサーボコネクタをつけていきます。
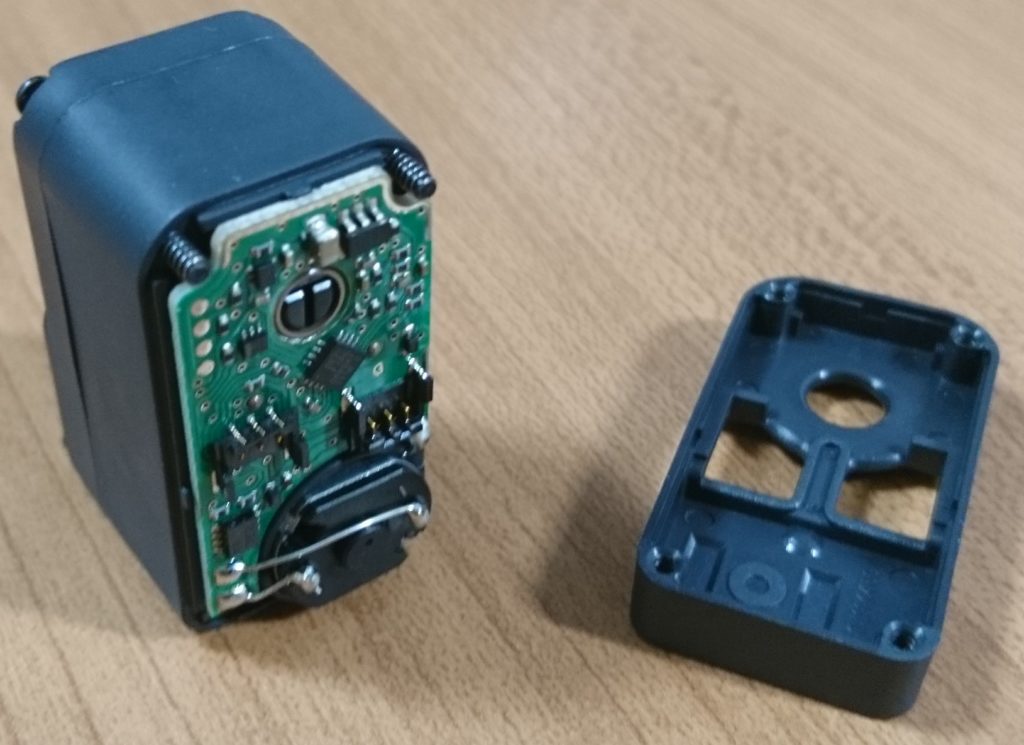

コネクタ接続 
絶縁シール貼付
次に、一旦サーボの蓋を仮止めし、サーボの動作確認に移ります。
サーボの動作確認
仮蓋をしたサーボをテストボードに接続し、テストボードの電源を入れます。
LEDの1番が点滅したら、「TEST/SET」ボタンを押して、動作確認します。

毎度のことながら、ここで動作しなかった場合は、サーボコネクタの接続を確認してください。
サーボIDの書き込み
サーボのIDを書き込みしていきます。
今回のサーボは21番を書き込みます。
テストボードの「UP」ボタンを、LEDの「20」と「1」が光るまで連打し続けます。
「20」と「1」が光りましたら、「TEST/SET」ボタンを長押しし、サーボへの書き込みを実行します。
書き込みが完了しましたら、一度テストボードの電源を入れ直します。
その際、LEDの「1」が点灯していることを確認してください。
点滅ではなく点灯です!
次に、「UP」ボタンを連打し「20」と「1」まで移動したら、LEDが点滅することを確認してくだい。
点滅していたら書き込みが成功しています。
念のために、ここで再度「TEST/SET」ボタンを押し、サーボが動作するか確認してください。
動作していれば問題なしです!

書き込みに問題がないことが確認できましたら、サーボモータに21番のシールを貼っておいてください。
サーボモータの取り付け
動作確認済みのサーボモータの仮蓋を外し、前号までに組み立てた左腕の部品に取り付けていきます。
サクッとはめてネジ止めするだけです。


しっかりはめてネジ止めすると、以下のような形になります。

以上で、本号の組み立ては終了です。
楽勝ですね!
まとめ
そろそろ組み立てに歯ごたえが欲しくなってきますね。
ちょっと簡単な作業が続いて、退屈してきました。
なんて油断していると痛い目に合うんですけどね! 笑
皆さんは油断せずにいきましょう!
それでは、今回はこのへんで!
では、また次回(* ̄▽ ̄)ノ~~ マタネー♪

コメント