

どうも、タナシンです(・∀・)ノ
久しぶりになりますが、今日も引き続きロビの作成を進めていこうと思います。
今日はパート12です!
週刊ロビ2 第12巻 マガジン部分

今号は掃除機で有名なダイソンの取締役・ジェイク・ダイソン氏と高橋智隆氏の対談記事になります。
ダイソン氏は社内でLED証明の設計・デザインをしている方のようです。
今回はそんなデザイナーでもあるダイソン氏と高橋氏がデザインについて語り合っています。
この対談記事は前半らしく、どうやら次号に続くようです。
デザインのお話の中で、高橋氏がロビをIoTデバイスにしなかった理由を述べています。
今までこのブログを読んでくださっている方は承知しているかもしれませんが、ロビはインターネットにつながる機能がありません。
機能拡張もQRコードで実施します。
その理由が、インターネットにつなげる前提のロボットとすると、ユーザにネット接続の手間を与えたり、コネクションの遅延で問題が生じたりといった問題が発生するかららしいです。
またそれに加えて、アメリカなどでの展開も見越して、インターネットに繋がないようにしているらしいです。
アメリカでは通信できるおもちゃは規制がかかっているようです。
個人情報の流出などのセキュリティが問題になるとのことです。
その点、通信をしないロビは 容易にアメリカで展開できるということだと思います。
ロビは外観のデザインだけでなく、機能的なデザインも高橋氏の思いが詰まっていますね。
一方、対談相手のダイソン氏も照明のデザインという点で非常に拘りを持っています。
ダイソン氏は照明そのもののデザインだけでなく、空間にどのように照明を 配置するかというデザインに拘りを持っているようです。
どうやら、LEDなどの新しい照明が出てきても、空間をどうやって明るくするかに関して新しい挑戦をしている人はあまりいないようです。
そのため、ダイソン氏は照らし方自体を効果的に変えるデザインを考えているようです。
このようなダイソン氏の目の付け所は非常にニッチかつ革新的だと思います。
照明という昔からあるものに対した新しい視点での挑戦。
とても面白い試みですね!
高橋氏がこの対談の中で以下のようなことを言っています。
シンプルで本質を捉えたものは、
引用:ロビ2 12号 対談記事より抜粋
僕も大好きです。
そこに本当の美しさがあると思います。
シンプルで本質を捉えたものに本当の美しさがあるという言葉は非常に印象的です。
近年、ものづくりにおいて、無駄に高機能なだけでなく、ユーザが求める本当に必要な機能のみにした商品が出てきたりしています。
この流れは、高橋氏の言葉通りの動きなんだと思います。
まぁもしかしたら、単機能であれば安く作れるという途上国の動きが活発になったからかもしれませんが……
ただ、個人的には日本の製品は高機能すぎるものがチラホラあるなと感じています。
もっとシンプルにできるのではないかと思いますが、あまりそういう商品が出てこなかったりします。
ですが、これは日本のものづくりの事情が関わっているようです。
というのも、日本は途上国に比べて人件費が高いです。
何をアタリマエのことを言っているんだと思うかもしれませんが、これがシンプルなものづくりを難しくしている要因の一つです。
なぜなら、人件費が高い場合、安くできる限度が高くなってしまうからです。
どんなに機能を削ぎ落としたシンプルな良いものを作っても、日本の人件費で作ってしまうと商品価格はあまり下がりません。
そのため、単純な価格競争で、人件費の安い国の商品に勝つことができなくなります。
そうなると、日本は高機能の高級品で勝負をするという、途上国がまだ戦えない領域で戦うしかなくなってしまっています。
近年は中国・韓国・台湾などの台頭で、それすらも危うくなっているのですが……
スマホとかがわかり易い例です。
シンプルにもできず、高機能でも勝負できず、撤退を余儀なくされるという状態ですね。
同じ理由で、パソコンやテレビなども押されそうな気がします。
白物家電も近いことが起きそうですが、生活家電に関しては国ごとの文化や地域性によって要件が細かくありそうなので、すぐに海外に取って代わられることはないような気がします。
海外での優位性はなかなか上がらなそうですが……
ただ、ダイソンの掃除機のような例もありますので、いつ海外に話題を持っていかれるかはわかりませんね。
ちょっと悲しいです。
今号の組み立て
ここからは今号の組み立てをしていきたいと思います。
今後の部品は以下です。
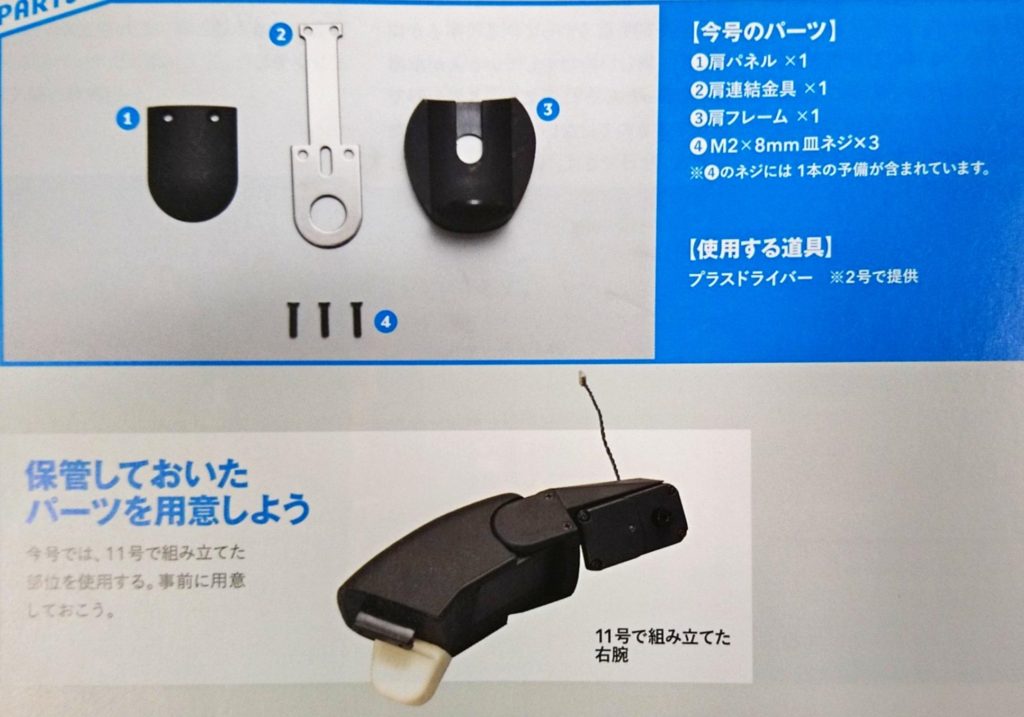
使用する部品一覧 
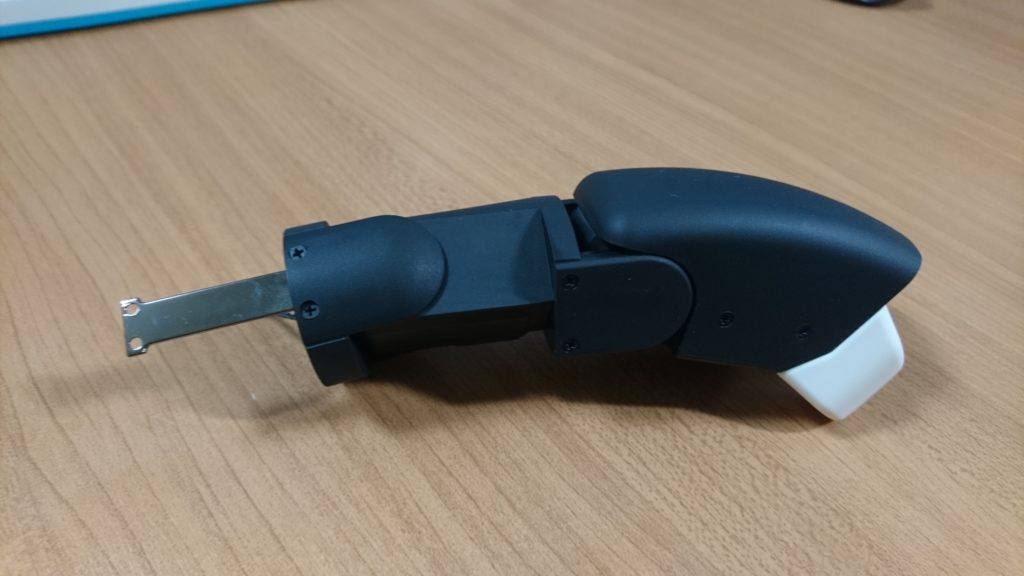
実際の部品
今回は右肩を作成していく作業です。
ぶっちゃけ、簡単すぎてあまり作業ないです 笑
最初に組み立て済みの右腕に、肩連結金具を当てていきます。
この時、金具のネジ穴の向きに注意してください。
細い方のネジ穴は、片面に皿ネジ加工がされています。
それが腕の外側に来るように配置し、ケーブルを通していきます。

金具の配置 
ケーブルの通し方
次は、肩フレームをサーボシャフトにはめていきます。
この時、差し込みのDカットの位置に気をつけて、しっかり押し込んではめてください。

最後に、肩フレームの反対側に肩パネルを取り付け、ネジ止めします。

以上で作業は終了です。
完成全体像はこんな感じです。
組立作業自体はここまでですが、念の為ここでサーボモータの動作確認をしておくことをおすすめされます。
この作業では、サーボケーブルを引っ張ったりしますので、差し込みが甘くなっていないかなどを確認するためです。
以前の号でもやった通り、テストボードを利用して、ID17,18のサーボを動作させてみてください。

上記のテストで問題なく動けばOKです。
以上で、今号の作業は完了です。
まとめ
今号の組み立てはちょろいですね。
今号はダイソン氏との対談が非常に面白かったと思います。
詳細は是非自らの目でお確かめください!
それでは、今回はこのへんで!
では、また次回(* ̄▽ ̄)ノ~~ マタネー♪

コメント