
どうも、タナシンです(・∀・)ノ
またまた久しぶりになりますが、今日も引き続きロビの作成を進めていこうと思います。
今日はパート13です!
週刊ロビ2 第13巻 マガジン部分

今号の対談記事は前号に引き続きダイソン氏と高橋氏の対談です。
今回のテーマは「クリエイティブなことに興味を持ったきっかけは?」というものです。
高橋氏はロボット研究者の多くが憧れるであろう鉄腕アトムがきっかけでロボットクリエイターを目指すようになったようです。
一方、ダイソン氏は面白いことがきっかけでデザインに目覚めています。
ダイソン氏が5歳の頃に学校でワイングラスの写生をしていたところ、教師から「ここから見るとワイングラスの上面は楕円でしょう」と指摘されたらしいです。
その際、ダイソン氏はワイングラスの楕円形について教師とディスカッションしたようです。
それ以降、ワイングラスをちゃんと描けるようになったらしいのです。sそう、ワイングラスをある角度から見ると楕円に見えるというものを徹底的に理解したところ、急にデザインが上達したようです。
それ以降、ダイソン氏は父親のものづくりの仕事を手伝ったようです。
16歳の頃にはABS樹脂を使って掃除機を作っていたようです。
すごいですよね!
今後は、ダイソン氏がデザインした照明が、正式にダイソン社の商品として採用されることになったようです。
そのため、ダイソン氏の挑戦はますます進むとのこと。
ぜひ頑張っていただきたいですね。
サーボモータの仕組み
今号には対談記事とは別に、サーボモータの仕組みを解説する記事も掲載されていました。

こちらでは、ロビに使われている双葉電子工業製のコマンド方式サーボモータの仕組みの説明です。
なんでも、サーボモータの形状は初代ロビと変わらないものの、出力トルクは10%向上しているらしいです。
コネクタの付き方が変わっているのには気がついたのですが、トルク出力が上がっていたのには気が付きませんでした。
また、減速機の調整もされているようで、よりなめらかに動作するようです。
とても細かい調整のように見えますが、20個以上のサーボを使うロビにとってはとても大きな影響です!
記事右側のページに記載されているサーボモータの仕組みは、一般的なサーボモータの仕組みを解説してくれているので、とても勉強になりますよ!
今号の組み立て
ここからは今号の組み立てをしていきたいと思います。
今後の部品は以下です。

今号の完成図 
今号の部品
今号からは左腕の組み立てのスタートです。
今回の作業は右腕でも一度やっている作業なので、非常に簡単です。
指ホルダーと親指を取り付けるだけです。
指ホルダーの取り付け
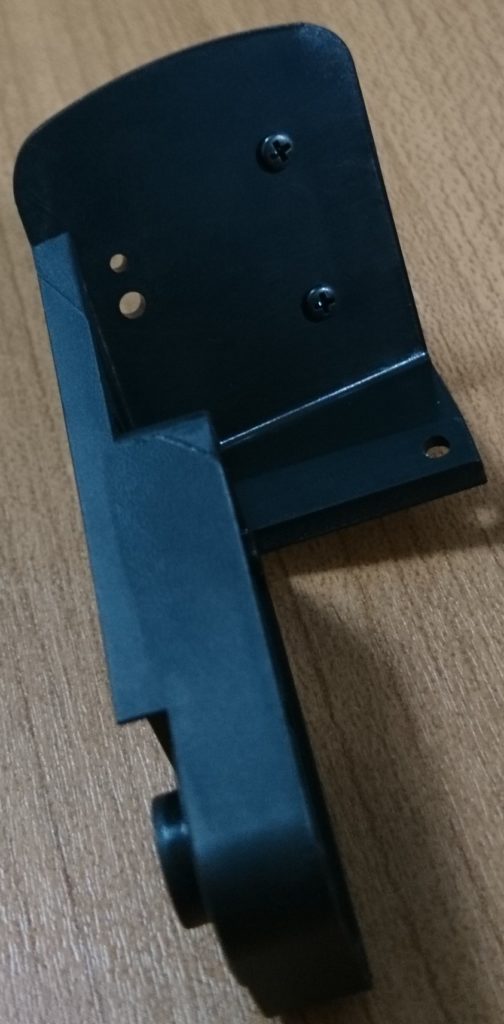
まずは指ホルダーの取り付けです。
黒い小さな突起を、腕の溝にはめ込み、腕の裏側からネジ止めします。

使う部品 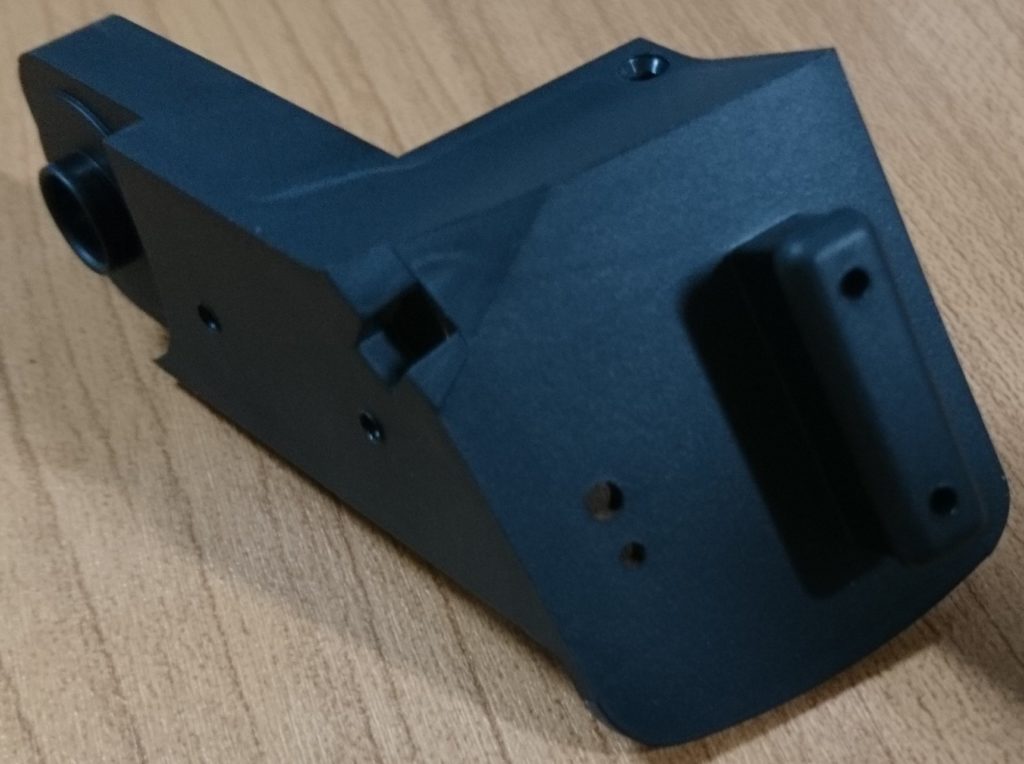
指ホルダーはめ込み
親指の取り付け
次に親指を取り付けていきます。
これも、腕の溝に親指をはめ込み、腕の裏側からネジ止めします。

親指のはめ込み 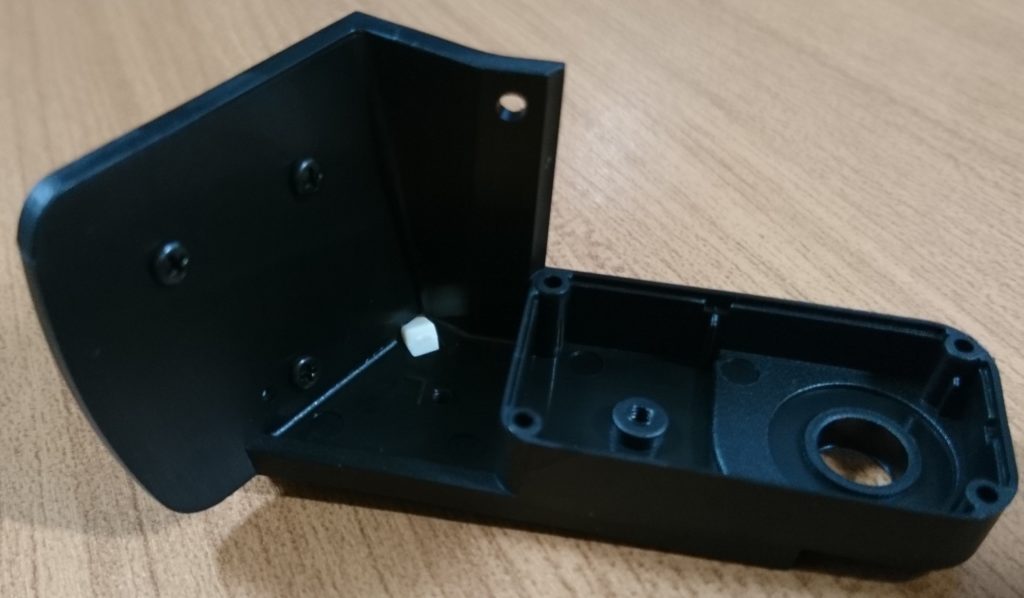
ネジ止め
簡単ですね。
最終的な完成形は以下になります。

今号のおまけ情報
今号ではロビで使用されるサーボモータのID一覧が載っていました。
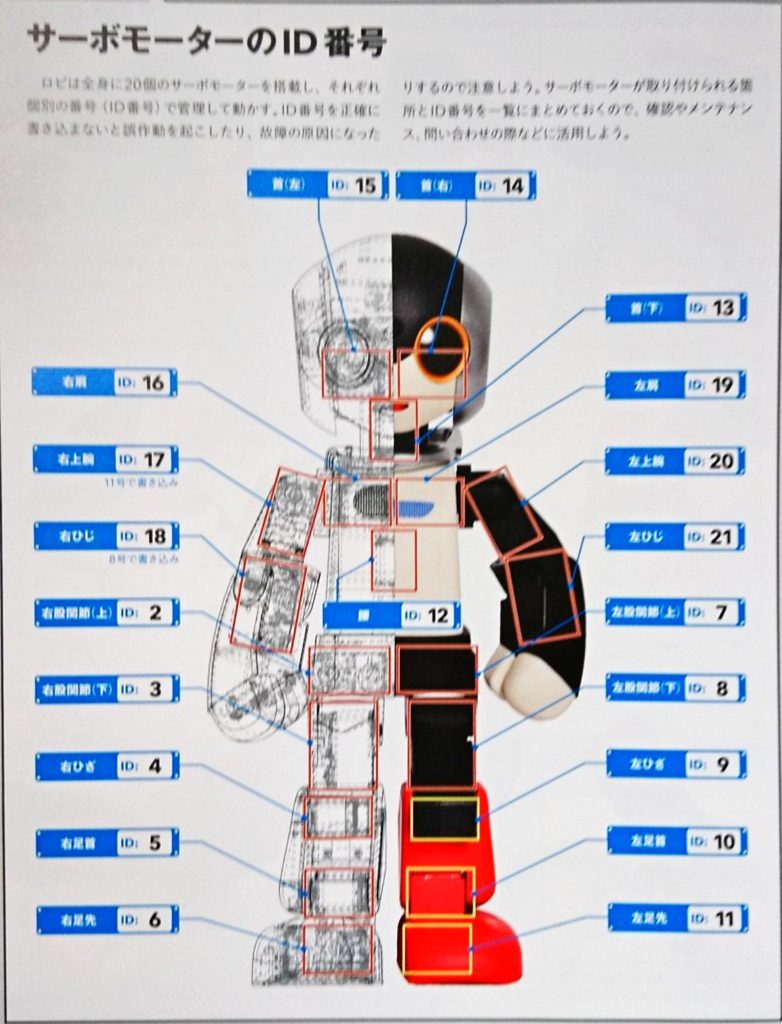
これがあれば一目瞭然ですね。
今はまだ組み立て序盤ですが、これからどんどん組み上がって、サーボの動作テストをする際にはこの情報が非常に重要になってきます。
なにせ、なにか不具合があった際に、どこが悪いかがわかっても、それが何番のサーボなのかを確認するのが意外と面倒だからです。
私は初代ロビで結構苦労しました 笑
うまく活用していきたいですね!
まとめ
今号はちょろすぎて記事が短くなってしまいました。
ちょっとリアルが忙しいこともあり、ブログの更新が滞っていますが、最低でも週一更新はしてきますのでお付き合いいただければと思いますm(_ _)m
それでは、今回はこのへんで!
では、また次回(* ̄▽ ̄)ノ~~ マタネー♪


コメント