どうも、タナシンです(・∀・)ノ
今日も引き続きロビの作成を進めていこうと思います。
今日はパート11です!
週刊ロビ2 第11巻 マガジン部分
と、言いたいところですが、今回はロボット作成号となっておりまして、全くマガジン部分がありません。
びっくりするほどありません。
なので、組み立て解説のみです!
今号の組み立て
今号は付いてきたパーツがサーボモータ1つだけです。
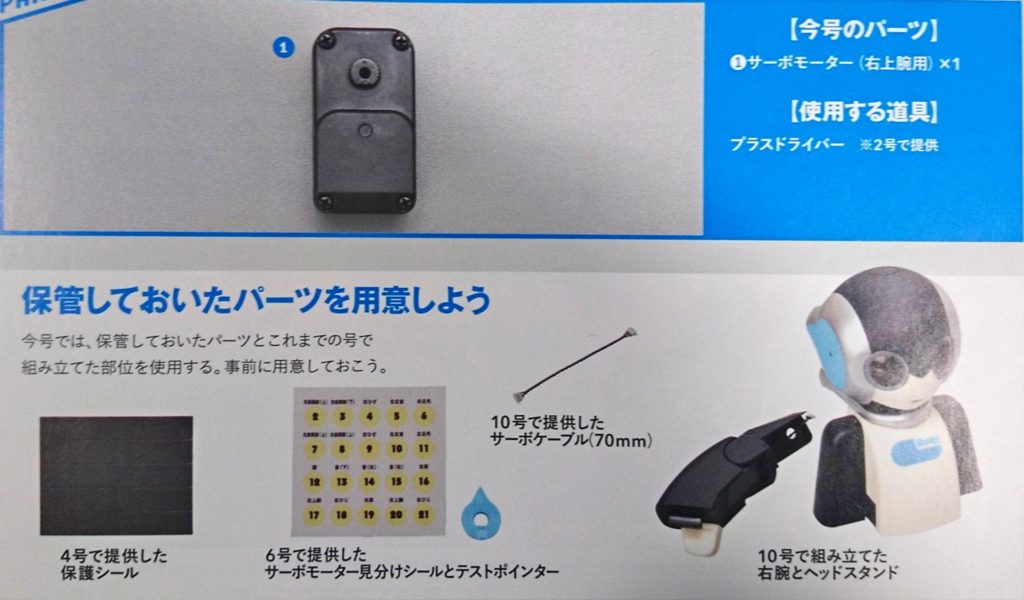

これは右の上腕になるサーボモータです。
ですので、今号は前号に引き続き、右腕を作成していきます。
サーボケーブルの接続
今号に付いてきたサーボの組み立てをやっていきます。
使うのは、今号で届いたサーボモータと、前号までに届いたサーボケーブルです。

ここでやる作業は、今までにもやってきたケーブル接続です。
サーボケースを外して、ケーブルを付けます。
そしたら、ケーブルの接続部に絶縁シールを貼り、再度サーボケースを閉じます。

ケーブル接続 
絶縁シート添付 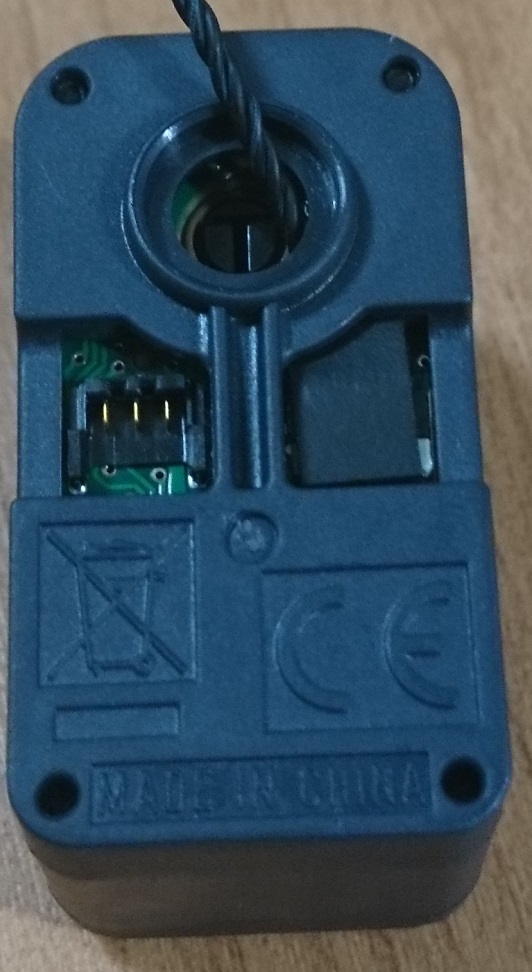
サーボケース取り付け
サーボモータの動作テスト
サーボケーブルがつけられたら、今までのサーボ同様に動作確認を行っていきます。
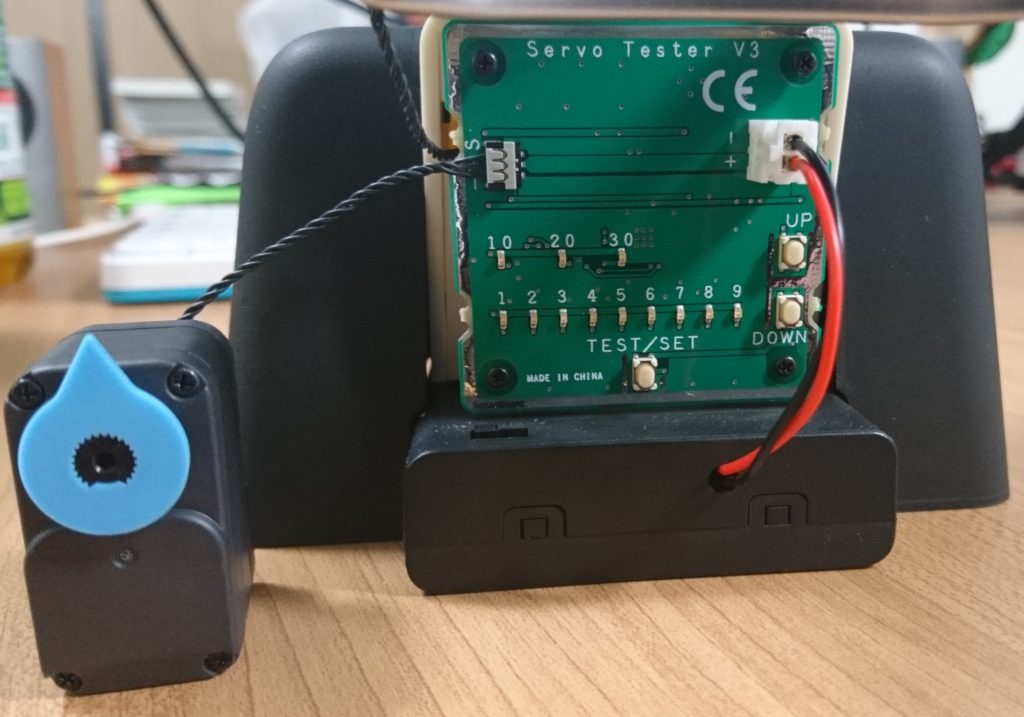
テストボードにケーブルを接続し、電源を入れて、TEST/SETボタンを押して、動作を確認します。
動作確認の際はテストポインター(青い尖った部品)を取り付けるのを忘れないでください。
ここで正常にサーボモータが動作しなかった場合、以下を確認してください。
- サーボケーブルがちゃんと接続されているか
- テストボードにサーボケーブルがちゃんと接続されているか
- テストボードのバッテリは十分にあるか
サーボIDの書き込み
サーボモータが正常に動作したことを確認したら、IDの書き込みをおこなっていきます。
今回のサーボIDは17になります。
IDの書き込みは以前にもやりましたが、念の為もう一度やり方を記載します。
実際の作業の前に、一度テストボードの電源はOFFにしておいてください。
- テストボードの電源を入れる
- 書きみたい番号になるまでテストボード右側の「UP」ボタンを連打する
- 「TEST/SET」ボタンを長押しする
上記の手順でテストボード上の「10」と[7」のLEDが点滅したら書き込みが成功しているはずです。
書き込みが成功しているかどうかは、一度電源を切り、再度電源を入れてから、IDを17に移動させます。
移動した際に、ID番号のLEDが点滅したら書き込み成功です。
もし、17以外のLEDが点滅したり、17のLEDが点灯したりしていたら、書き込みに失敗していますので、再度書き込みを試してください。
書き込みが成功したら、テストポインターは外して構いません。

書き込みが完了したら、保管していたサーボモータ番号シールの17を貼っておきましょう。

右腕パーツへのサーボ取り付け
今号で届いたサーボの動作確認とID割付ができましたら、このサーボを前号までに組み立てた右腕に取り付けていきます。
まずは、動作確認した今号のサーボモータのケース蓋を再度外します。
そして、右腕側のケーブルを今号のサーボモータに取り付けます。
取り付けたサーボもターのコネクタ部分に絶縁シートを貼ります。
ここまでできたら、サーボモータを右腕上腕部に取り付け、ネジ止めします。
この際、サーボケーブルを挟んでしまわないように注意してください。

使う部品 
コネクタ接続 
絶縁シート貼付 
サーボ取り付け
右腕の動作テスト
2つのサーボモータが連結した右腕を、動作確認していきます。
この際、上腕側のサーボモータにはテストポインターを取り付けておいていください。
上腕側から出ているサーボモータのケーブルを、テストボードに取り付けてください。
この状態でテストボードの電源を入れ、IDのLEDを17に移動させてください。
この状態で「TEST/SET」ボタンを押し、テストポインターが動くのを確認してください。

上腕が動いたら、次は下腕を動作確認します。
テストボードのIDを18に切り替えて、再度「TEST/SET」ボタンを押してください。
これで肘が動作します。
この際、下手な位置に置いておくと、腕が転がって落っこちてしまいますので、気をつけてください。

ここまでできたら、今号の組み立ては完了です!
まとめ
はい、というわけで、今号の完成品は以下!

ザ・ロボットの腕!というものが、ついに動作し始めましたね!
少しずつ、ロボットができあがっていくところが体感できるところが、ディアゴスティーニの良いところですね。
普通のロボットキットは一気に作ることが多いので、このちょっとづつというスピード感は週刊連載ならではです。
今後も楽しみですね!
それでは、今回はこのへんで!
では、また次回(* ̄▽ ̄)ノ~~ マタネー♪


コメント