
どうも、タナシンです(・∀・)ノ
今日も引き続きロビの作成を進めていこうと思います。
今日はパート9です!
週刊ロビ2 第9巻 マガジン部分
今回は久しぶりの対談記事です。
対談はいつもの高橋氏と、林要氏です。
林氏はあのソフトバンクのロボット「Pepper」の開発リーダーを務めた方です!

また、林氏はトヨタ自動車でレクサスLFAの開発にも参加されていた方です。
まさにものづくりのプロフェッショナルですね。
ちなみに、今回の記事は次号へ続く2部構成のうちの前半のようです。
対談の序盤は、今林氏が作ろうとしているロボットについてです。
林氏はPepperの際に、ロボットにおける説明の限界に挑戦したようです。
できる限りの表現力をロボットに与え、説明能力を付けさせようとするものだと思います。
実際にPepperと接したことのある人はわかると思いますが、Pepperは言葉だけでなくジェスチャーなども使って巧みなコミュニケーションを取ってきますよね。
これが、説明の限界に挑んだ結果だと思います。
一方、現在開発しているロボットは、できる限りシンプルにするロボットのようです。
Pepperとは逆のアプローチですね。
高橋氏も言っていますが、このアプローチは非常に難しいです。
人間で言ったら、サイレントで笑いを取るみたいな感じです。
できないことではないかもしれませんが、容易ではないですよね!
林氏は林氏で、高橋氏のロビ2の取り組みを興味深く感じているようです。
その1番の理由が、Q-boを登場させたことです。
Q-boはロビとコミュニケーションが取れる相棒ロボットです。
お二人いわく、コミュニケーションが3者になることで、ロボットのコミュニケーションの仕組みが面白くなるとのこと。
確かに、今まではロボットとユーザという2者間でのコミュニケーションばかりでした。
それは機能的に見ると、2者間コミュニケーションで十分だからだと思います。
コミュニケーションロボットとして、遊びをもたせようと思わない限り、3者間コミュニケーションをロボットにさせようとは思わなかったでしょう。
ここに着目してやってしまうのが、高橋氏のすごいところだと思います。
さて、インタビュー記事に関してはここまでです!
今号の組み立て
というわけで、今号の組み立てを進めていきたいと思います。
今号のゴールとパーツは以下です。

部品一覧 
今号のゴール
実際の部品は以下のような感じで入っています。

今後は右腕を組み立てていきます!
指ホルダーと親指の取り付け
まずは指ホルダーなるものを腕パーツにつけていきます。
小さな部品を腕パーツのくぼみにはめ、裏からネジ止めします。

使う部品 
指ホルダーのはめ込み 
ネジ止め
次に、親指を腕パーツにはめ、ネジ止めします。

使う部品 
親指をはめてネジ止め
サーボモータの取り付け
前号までに動作を確認したサーボモータ(ID18)を腕にはめていきます。
サーボカバーを外し、代わりに腕パーツをはめてネジ止めします。

使う部品 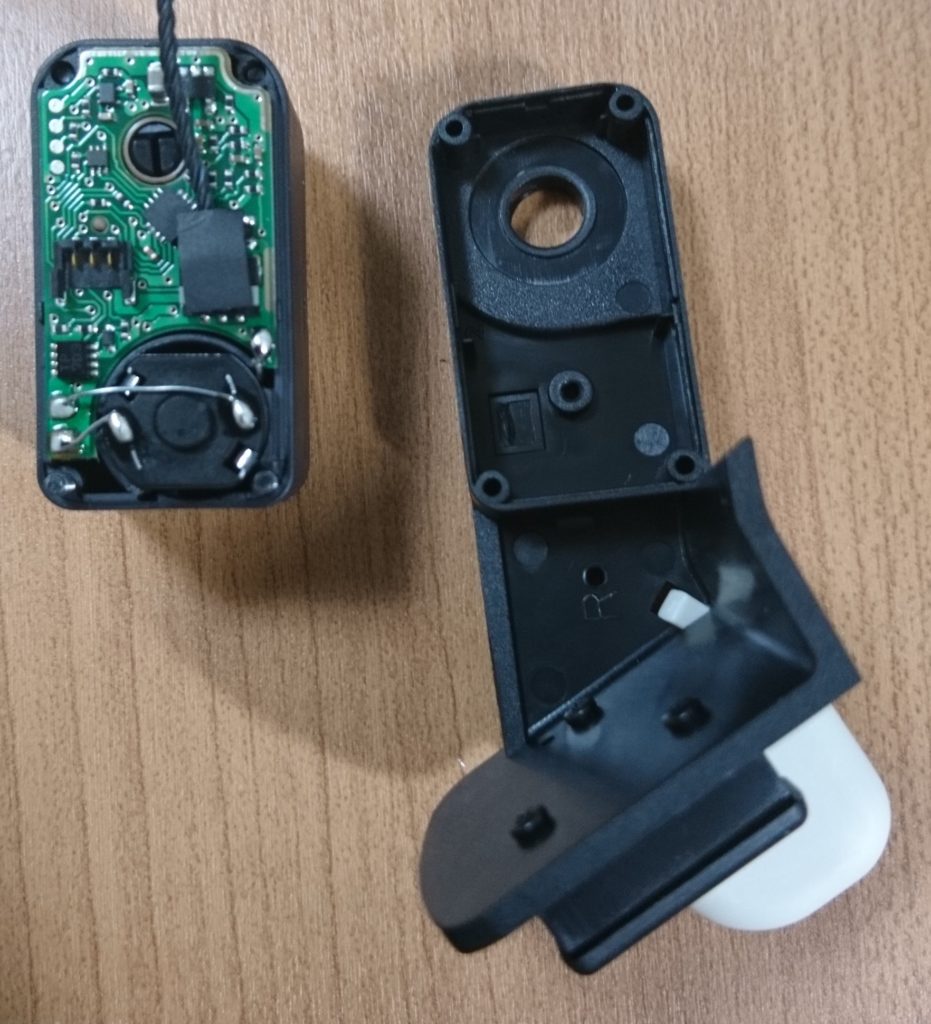
サーボカバー外し後

肘のパーツ取り付け
肘パーツをサーボモータのシャフトにはめます。
本当にはめるだけです。しっかり押し込んでください。

使う部品 
肘パーツはめ込み後
次に右肘フレームを取り付けます。
右肘フレームのくぼみが、先ほど取り付けた右肘にはまるように取り付け、ネジ止めします。

使う部品 
右肘フレーム取付後
前腕カバーの取り付け
今のままでは腕がみすぼらしいので、それを覆うカバーを取り付けます。
腕パーツに合うように前腕カバーを取り付け、ネジ止めします。

使う部品 
前腕カバー取付後
今号の作業は以上です!
ひたすら部品を取り付けてネジ止めという地味な作業でしたね。
このような作業が、ロボットづくりの醍醐味となります!
まとめ
ついに手足の部品に取り掛かることになりましたね!
今までは胴体と頭だけだったので、これからどんどん人形らしくなっていきそうです。
ちなみに、胴体はもう一度作ることになります。
今のは中身が空っぽのハリボテですからね。
あくまで首動作の確認用台座ですから!
ついでにお伝えしておくと、このロビシリーズは1週間の間に3記事以上にならないように調整して書いています。
この手の記事ばかりになってしまうと面白くないだろうなーという考えからそうしています。
ですので、更新スピードはあまり早くありませんが、気長にお付き合いいただけると幸いです!
それでは、今回はこのへんで!
では、また次回(* ̄▽ ̄)ノ~~ マタネー♪


コメント