
ロボット大好き!
どうも、タナシンです(・∀・)ノ
もともとは好きな技術題材を記載するためのブログだったのに、すっかりそんなことを忘れてしまったようなブログになった今日このごろ。
ちゃんと技術的な題材も扱います!
というわけで、今回はビックサイトで開催されているイベント「ロボデックス」に参加してきたので、気になったものの紹介を含め、ご紹介をしていきます。
ロボデックスとは
その名の通り、ロボット関連の展示会です。
ロボットに関する新技術・新商品・周辺技術など、何でもかんでもごちゃまぜに展示されます。
基本的にはビジネスマン向けの商談専用の展示会ですので、学生はちょっとハードル高く感じるかもしれません。
私はビジネスマンなので堂々と行きました!
ロボット関連の会社員ではないですけどね!
ちなみにこちらの展示会は複数の展示会と共同開催です。
他にはスマート工場EXPO、ウェアラブルEXPO、オートモーティブワールドなどなど、幅広い展示会が開催されています。
私はロボデックスとスマート工場EXPOとウェアラブルEXPOを回ったらヘトヘトになりました......
気になった企業・技術の紹介
株式会社 MUJIN

MUJINは世界でも珍しいロボットベンチャーの企業です。
こちらの企業は知っている方も多いのではないでしょうか?
つい最近、テレビ東京のワールドビジネスサテライト(WBS)で紹介されました。
WBSで紹介されたときの記事は以下で紹介されています。

上記の記事でほとんど紹介されてしまっているのですが、その内容の展示とプレゼンテーションがブースでは見ることができました。
プレゼンテーションであった説明なのですが、MUJINは生産現場へのロボット普及がなかなか進まない理由として、以下の4つを挙げています。
- メーカーごとに操作方法が違う
- ティーチングが難しい
- ロボットを知能化するのが難しい
- 新規ロボットメーカーになるのは難しい
1,2に関しては、産業用ロボットに触れたことのある人ならイメージつくと思います。
産業用ロボットはメーカーごとに異なるコントローラがあり、その操作を覚えないと使えないです。
さらに、パソコンを使って動作プログラムを作ろうと思っても、各メーカーごとの専用プログラミング言語がある場合もあり、それも覚えないと使いこなせない場合があります。
私も今までに三菱電機、デンソー、ファナック、安川電機など、一通りのロボットを触ってきましたが、何一つ使いこなせていませんorz
1,2に加え、ハードルが更に上がる理由は3です。
多くの場合、ロボットを賢くしようと思った場合、センサやカメラを備えつけて、外部環境情報を取得する必要があります。
ですが、多くの場合、このようなセンサやカメラはC++などのプログラミング言語で書かれたりします。
場合によってはLinuxOSでプログラミング環境を作らなければならない場合もあります。
ただでさえ、ロボットそのものを動かすのに専用のプログラムを覚えなければならないのに、それに加えてC++などの言語のプログラムを統合しなければならないので、超難しいです。
上記のような状態であるため、もちろんロボット産業への新規参入は更に難しいのですが、それに立ち向かったのがMUJINという企業です。
MUJINの面白いところはロボットベンチャーであるにもかかわらず、ロボットを作っていないということです。
MUJINはロボットではなく、ロボットのコントローラを作っている会社です。
先程挙げたロボットが普及しない4つの理由ですが、MUJINから言わせればすべてコントローラが原因とのことです。
1はすべてのロボットに対応したコントローラがあれば良い。
2はティーチングが簡単にできるコントローラがあれば良い。
3は自動で知能化してくれるコントローラがあれば良い。
4はどんなロボットにも対応するコントローラがあれば容易になる。
とのことです。
そして、それを実現するロボットコントローラを開発してしまったのがMUJINであるとのことです。
MUJINが開発したロボットコントローラは、あらゆるメーカのロボットを操作できるだけでなく、接続さえできれば自作したロボットも制御できるらしいです。
また、モーションプランニングというAI技術を使っているため、ロボットの初期位置と目標位置を指定することで、ロボットが自ら考え動作を生成してくれるようです。
これ、ものすごいことです!
ロボットの動作生成は今まで多くの企業が研究してきました。
ですが、それを高い品質で実現し、かつ複数のロボットメーカーのロボットに対応してしまうというのはなかなかできることではありません。
ちなみに、モーションプランニングは自動運転などで使用されている技術らしいです。
技術としては知られたものではあるようですが、どうやらその権威が日本には2人しかいないらしく、1人はMUJIN、もう1人はトヨタ自動車にいるらしいです。
経路計画を賢くできるAIって、ものすごく使い道がありそうですよね。
もっと一般に広く普及してほしいです。
近年は3Dシミュレーションで、予め問題ない動作か検証する手法が徐々に普及してきていますが、もし人間が考えるよりも良い経路をモーションプランニングで簡単に生成できるのであれば、3Dシミュレーションで動作テストをするという工程すらいらなくなります。
MUJINはロボットコントローラだけでなく、3Dビジョンコントローラも開発しており、現在は物流への適用に力を入れているようです。
導入実績も増えてきているようです。
システム構成は以下のような感じになっているとのこと。
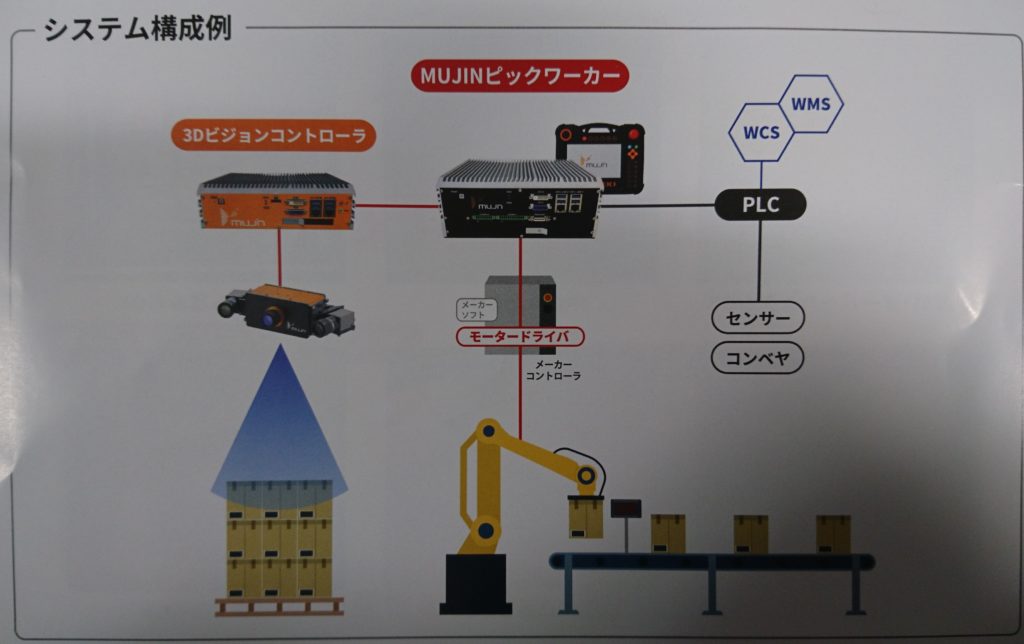
プレゼンの中で言われていた中で、面白いなーと思ったのが、中小企業での物流についての話でした。
上記のシステム構成のようにベルトコンベアへものを運ぶ仕組みの場合、すでに工場にベルトコンベアなどの自動化システムを導入している大手企業しか使えない仕組みになってしまいます。
一方、中小企業では工場の自動化はほとんど進んでいないため、ロボットだけ導入しても自動化の効果が小さいという欠点がありました。
MUJIN曰く、その課題に対する解決策の一つがAGVとのことです。
AGVはAutomated guided vehicleの略で、無人搬送ロボットのことです。
上で載せているMUJINブースの写真の右側でダンボールを運んでいるやつがAGVです。
MUJINはベルトコンベアの代用としてAGVにものを運ばせることで、工場内物流の自動化を小額から始められると謳っています。
私はAGVのことはもちろん知っていましたし、工場内の物流で使うことも承知していましたが、工場内物流自動化のスモールスタートに使うという点で目からウロコでした。
この考えのすごいことは、工場の拡大が必要であればAGVを増やすだけでよいということです。
そのため、将来工場内の自動化を拡大したいという場合に拡張性が高いです。
ベルトコンベアシステムの場合、拡大するにしても縮小するにしても再設計と再配置が必要であるため、融通がきかない部分があります。
プレゼンでは他のメリットとして、工場の引っ越しが必要になったときに容易に移動できることも挙げていました。素晴らしい!
もちろん、デメリットもあると思います。
AGVだと自動化効率がベルトコンベアより低かったり、AGVが動き回るので人との衝突が起きる可能性があったり、AGVが混雑して滞留してしまったりなどなど......
ただ、おそらくこの問題は事前のシミュレーションと完全自動化を実現した際には解決しているかもしれません。
長々と書いてしまいましたが、MUJINには無限の可能性を感じています。用チェクですね!
NTN株式会社

なーんーてーなめらかー
のCMソングでも有名なNTNが面白いものを展示していました。
それがこちら
見ていただきたいのは、手先のくねくねしている部分です!
ちょっと分かりづらいのでパンフレットの画像を添付します。

こちらはなんと、ロボットハンドの手首です!
ロボットアームの姿勢を変えることなく、手先を動かすことで、手先に保持した物体の姿勢を変えられるアタッチメントです。
パット見、何がすごいか分かりづらいかもしれませんが、私これはすごいと思っています。
というのも、今までロボットの手先の物体の姿勢を変えるためには、6軸のロボットアームの場合ロボットアームの姿勢ごと変える必要がありました。
その場合、もしロボットアームの姿勢を変えずらい場所(狭い場所など)だと、ロボットアームを動かせないということがおきます。
また、ロボットは特異姿勢という、絶対に取れない姿勢が存在します。
動かす際にそのような特異姿勢になってしまうと、途端に動かせなくなります。(MUJINのところで出てきた、ティーチングが難しいと言われる理由の一つはこれがあります)
特異姿勢に関しては、ロボットアームの軸を6から7に増やして、冗長にすることで回避するというロボットが一時期盛んに出ていました。
ですが、やはり手先の姿勢を変えるためには、ロボット全体の姿勢を変える必要があることには代わりありませんでした(おそらく...間違ってたらすみません)
ですが、NTNのこの手首は、ロボットアーム本体が動かなくても、手先の姿勢を変えることができます。
上部についた3つのモータと、それに繋がったくねくねしたリンクにより、手首のみで複雑な姿勢を取れるようにしているのです。
NTNではまだ開発中の技術らしく、まだ応用先は手先にカメラを付けて利用する外観検査くらいらしいですが、今後の発展が非常に気になる技術です。
まだまだ軽量化などの課題が多いようですが、動向を見守りたい技術です!
その他、ちょっと気になったもの
Unitree-Laikago

中国のスタートアップ企業が開発した、蹴られても倒れないロボットです。
こちらのロボット、知っている人は知っている、あのロボットにそっくりです。
そう、ボストン・ダイナミクスのBigDogです。BigDogは以下を参考にしてください。
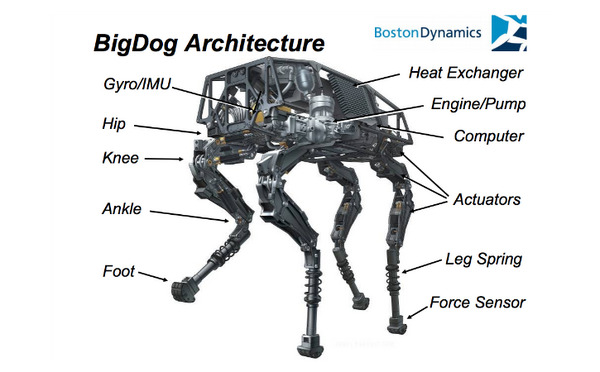
LaikagoはBigDogよりも小型で、ペットのようなサイズです。
まぁBigDogは軍事用開発だったので当たり前ですが......
ちなみに、ボストン・ダイナミクスはSpotMiniという軍事用でない4足ロボットもいますが、Laikagoはそれ以上に小さいです。
Laikagoは本当にペットサイズなので、価格が買えそうなレベルのものならほしいくらいです。
Laikagoのスペックは以下のような感じらしです。

他にも以下の記事で紹介されていますのでご興味があれば見てみてください。

デンソーウェーブ-COBOTTA

ロボットの有名企業デンソーウェーブが出している、超小型ロボットアームCOBOTTAです。
こちらのロボットはちょっと前から出ているロボットなので新しいものではありません。
ですが、非常に面白いなと思ったのが、このロボットをプラットフォーム化しようとしているように見えたことです。
こちらのロボットはいろいろな企業や大学と連携し、複数の機器やアタッチメントと連携していました。
COBOTTAは、企業がすでに使ってる機器をそのまま使ってもらいたい、そこからさらに拡張もしてもらいたいという思いがあるらしく、多くの機器と連携するためのインターフェースを持っているそうです。
この試みは、とにかくロボットを早く普及させる戦略の1つだと感じました。
ペッパーのように、導入を容易にすることで、まず使ってもらう。
そして一度使ってもらえれば、あとは継続してもらうことで、ユーザを増やし、自社の顧客を増やしていこうという方針なのだと思います。
このような戦略的な動きは面白いと思います。
このロボットがどう広がっていくか、要注目です。
感想
今回の展示会は、本当に面白い取り組みが多かったです。
最近のロボット展では、AI活用やIoT連携などが多かったですが、今回は純粋なロボット工学的な技術が光っていたように感じます。
もちろん私はAIやIoTも大好物なので大歓迎ですが、AIやIoTはそれ専門の展示会もたくさんあるので、ロボットの展示会でその手のものが多いと、変わり映えしないなーという感想がありました。
その点、今回はロボットの展示会を見に行った!という感想が大きかったです。
このイベントは1/18(金)までやっているので、興味がありましたらぜひ足を運んでみてください。
それでは、今回はこのへんで!
では、また次回(* ̄▽ ̄)ノ~~ マタネー♪
コメント
[…] ロボデックス参加レポート 次世代ロボットが満載!!ロボット大好き!もともとは好きな技術題材を記載するためのブログだったのに、すっかりそんなことを忘れてしまったようなブロ […]